
STEM與智能迷宮機械人
為什麼把智能迷宮機械人放進迷宮內,它能夠在迷宮內不停走動並找出離開迷宮路徑呢?為什麼智能迷宮機械人能夠避開一些障礙物呢?為什麼機械人又能跟隨物件移動呢?

智能迷宮機械人的構造
迷宮機械人的辦事方式和電腦的運作很相似,智能迷宮機械人內部設有輸入、處理、輸出及儲存的裝置,機械人的輸入裝置是紅外線感應器、處理裝置是內置的中央處理器、中央處理器包含了儲存裝置負責儲存要執行的程式,而輸出裝置就是摩打令機械人活動。
紅外線感應的感用
這款迷宮機械人可算是紅外線感測智能互動的六足機械人,已具有「跟隨」與「探索」二種互動模式。
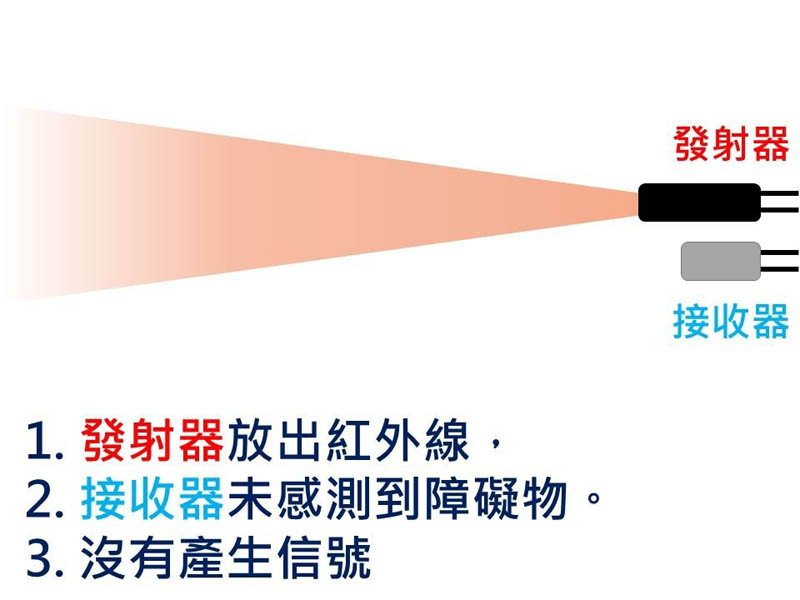
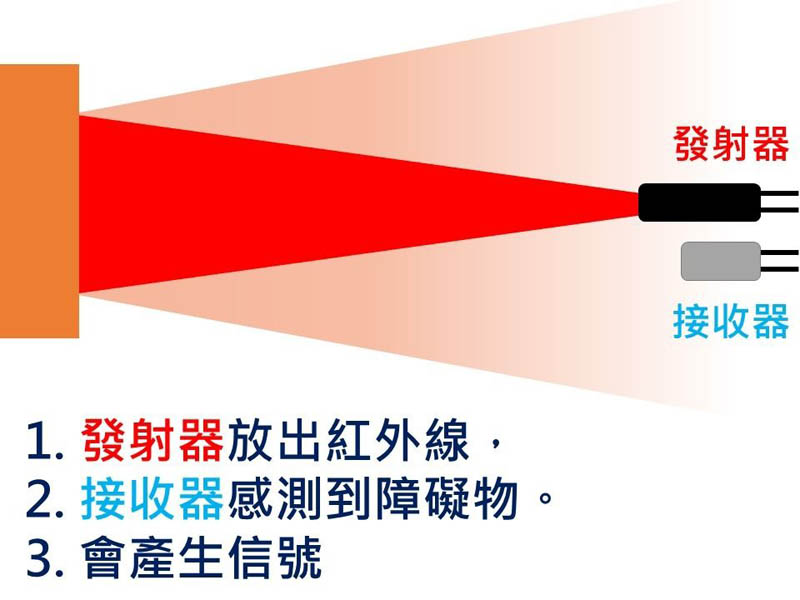
機械人的頭部的左右兩邊各自裝有一組紅外線感應器,每組紅外線感應器配置了一個發射器和一個接收器,當發射器發出的紅外線遇到障礙物時會被反射,接收器就會接收到被反射的信號,即接收器就可以按照是否收到信號來判斷前方是否有物體存在。
在「跟隨」模式下,智能迷宮機械人會按照左右兩組的接收器同時收到信號,來判斷前方有物體存在,以後便會向前進的摩打發出指令,控制機械腳向前行,這樣智能寶比就會成為一個忠心跟隨的小跟班,緊緊跟隨著小主人的行走方向移動;

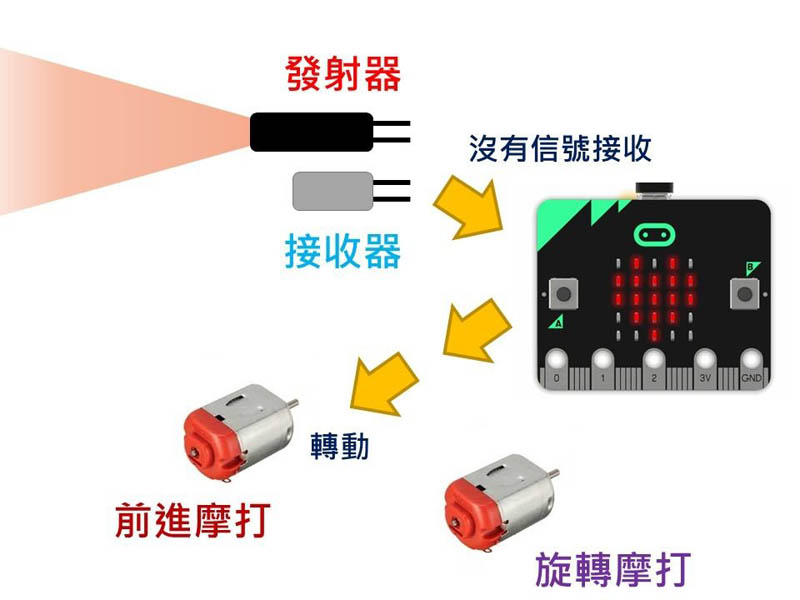
當轉換為「探索」模式後,智能迷宮機械人會按照左右兩組接收器所收到信號而行動,若果在沒有收到信號的情況下會控制機械腳不斷向前行;
當左邊的接收器收到信號時,便會向前進的摩打發出指令來停止機械人前進,然後會向轉向摩打發出指令,控制機械人的身體向右轉直至左邊的接收器接收不到信號才停止轉動,再繼續前行動作;
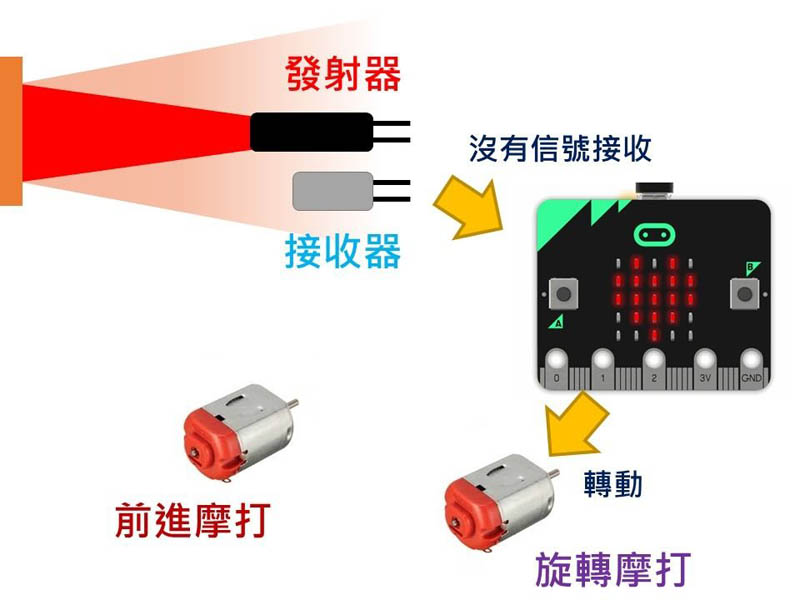
當右邊的接收器收到信號時,便會停止機械人前進,然後指示轉向摩打控制機械人向左轉直至右邊的接收器接收不到信號才停止轉動,再重覆前行動作;因此智能寶比便可以偵測到障礙物而避開,開闢自己的行走路徑。
機械中的動力來源
機械人內安裝了兩個摩打,連接著兩組不同的齒輪組來傳遞動力,一組摩打與齒輪組負責控制機械人的六足向前進,而另一摩打與齒輪組負責控制機械人向左或向右旋轉。
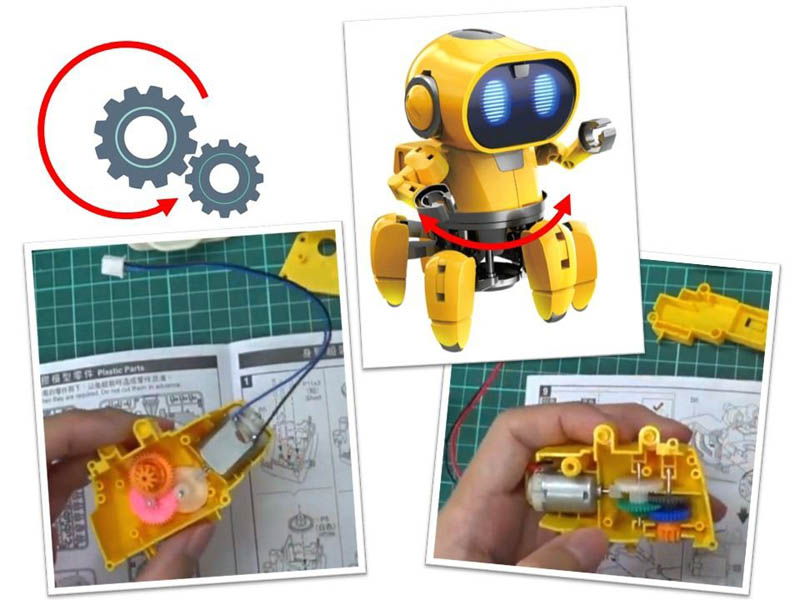
機械人之能夠利用六足向前走動是模仿了拐杖移動的方式,再配合槓桿原理和與地面之間的摩擦力所產生的作用力和反作用力而成。
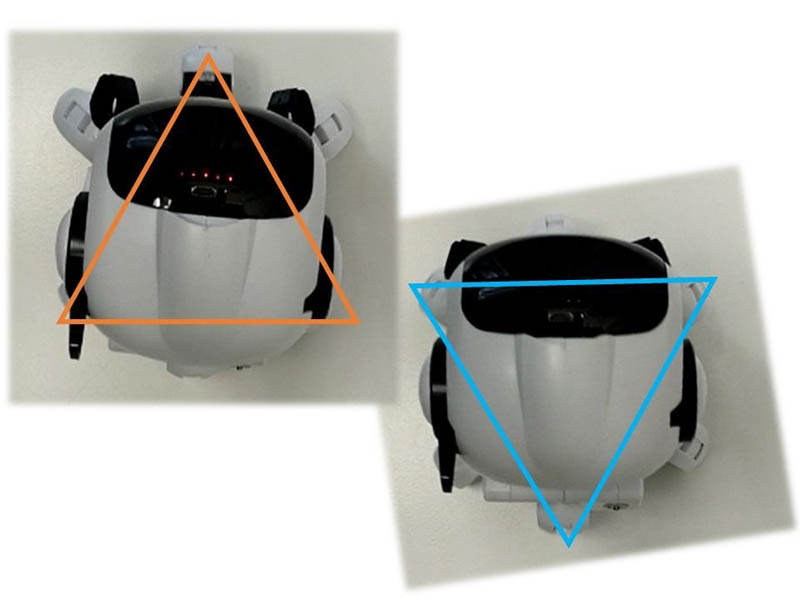
前進摩打的齒輪組帶動連桿以逆時針方向移動,令一組以等邊三角形排列方式的三隻腳一下的接觸地面,另一組的三隻腳會升起離開地面。當連桿繼續轉動時,原來接觸地面的腳會提起,而另一組會與地面接觸,就是這樣運用六足一下一下的向前走。
如果在智能迷宮機械人上加安裝辨識用的鏡頭,再連接人工智能的數據庫,就可以把機械人改裝成人工智能迷宮機械人,只要讓機械人進行學習記錄,就能計算出最快捷破解迷宮的路徑。
